Kolaborativni robotski prijemalnik – ISC Inner Soft Clamp Cobot Arm Gripper



Glavna kategorija
Industrijska robotska roka / Kolaborativna robotska roka / Električni prijemalnik / Inteligentni aktuator / Rešitve za avtomatizacijo / prijemalo kobotske roke / mehko prijemalo / prijemalo robotske roke
Uporaba

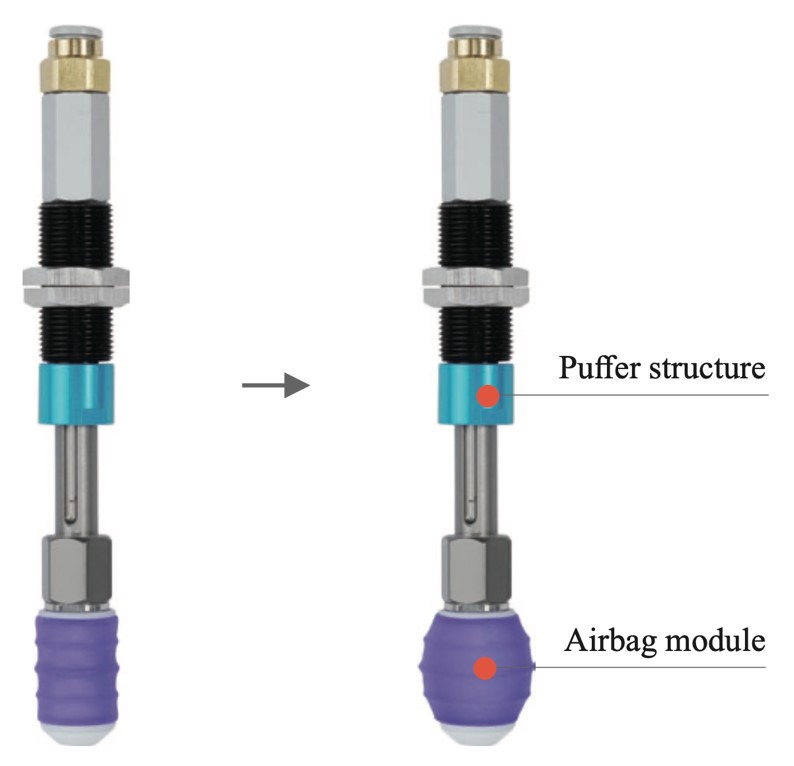
Notranja podporna objemka ISC je inovativen mehak pripomoček, katerega zasnova posnema morfologijo samoobrambe napihljivih rib. Z napihovanjem zraka pod pritiskom se pripomoček lahko razširi in dokonča notranji oprijem opore.
Ker je del, ki je v stiku z obdelovancem, iz mehke silikonske gume, se po dodajanju pritiska med togo nosilno in kontaktno površino ustvari plast "zračne blazine", zaradi česar je napetost enakomerna in ni verjetno, da bi poškodovala obdelovanec. Poleg tega je mogoče z vhodnim zračnim tlakom nadzorovati podaljšanje zračne blazine in napetost, ki je v stiku z obdelovancem, kar znatno poveča mehkobo sistema prijema.
Funkcija

·Mediji za vožnjo: čist zrak
·Standardna delovna življenjska doba: >100.000-krat
·Največja delovna frekvenca (cpm): 300
● Notranja podporna objemka ima posebno strukturo zračne blazine in lahko povzroči različne deformacije skupaj z notranjim tlakom.
● Vhodni pozitivni tlak: Pritrdilni element se iztegne, samodejno se podpre na notranji površini predmeta in dokonča prijem.
● Vhodni negativni tlak: Pripomoček predstavlja naravno stanje in sprošča predmete.
Mehka prijemala SFG so bila uporabljena z vrhunskimi kolaborativnimi robotskimi rokami, vključno z:

4-osni horizontalni (SCARA) robot Delta
Industrijska robotska roka Nachi Fujikoshi
4-osni vzporedni (Delta) robot ABB
6-osni kolaborativni robot UR
6-osni kolaborativni robot AUBO



Specifikacijski parameter
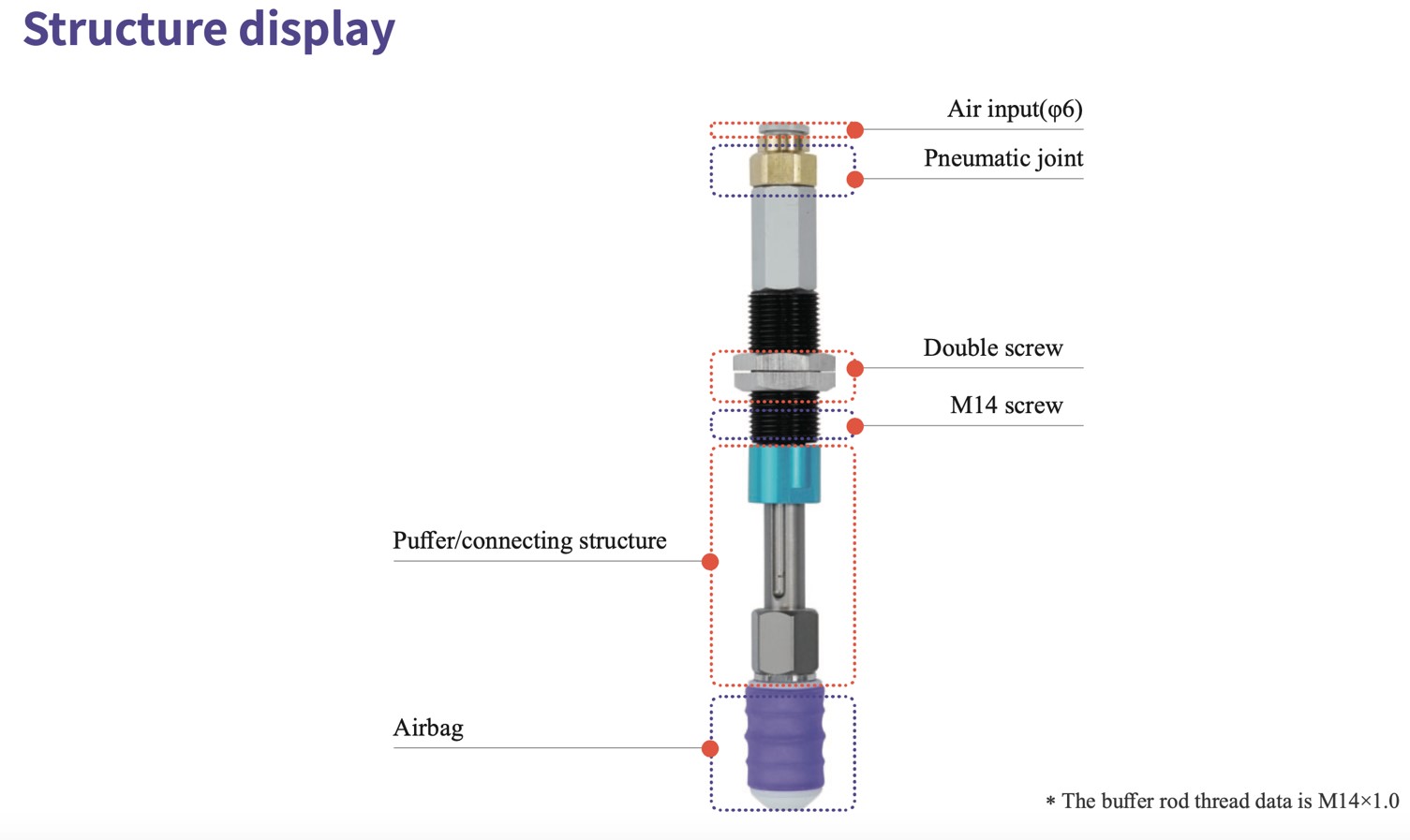
Notranja podporna objemka ISC za zračno blazino je inovativno mehko vpenjalo, katerega zasnova posnema morfologijo samoobrambe napihljivih rib. Z napihovanjem zraka pod pritiskom se vpenjalo lahko razširi in dokonča notranji oprijem opore. Ker je tlak vhodnega zraka mogoče natančno nadzorovati, je mogoče nadzorovati silo prijema vpenjala na obdelovanec, kar ne omogoča enostavne poškodbe obdelovanca.
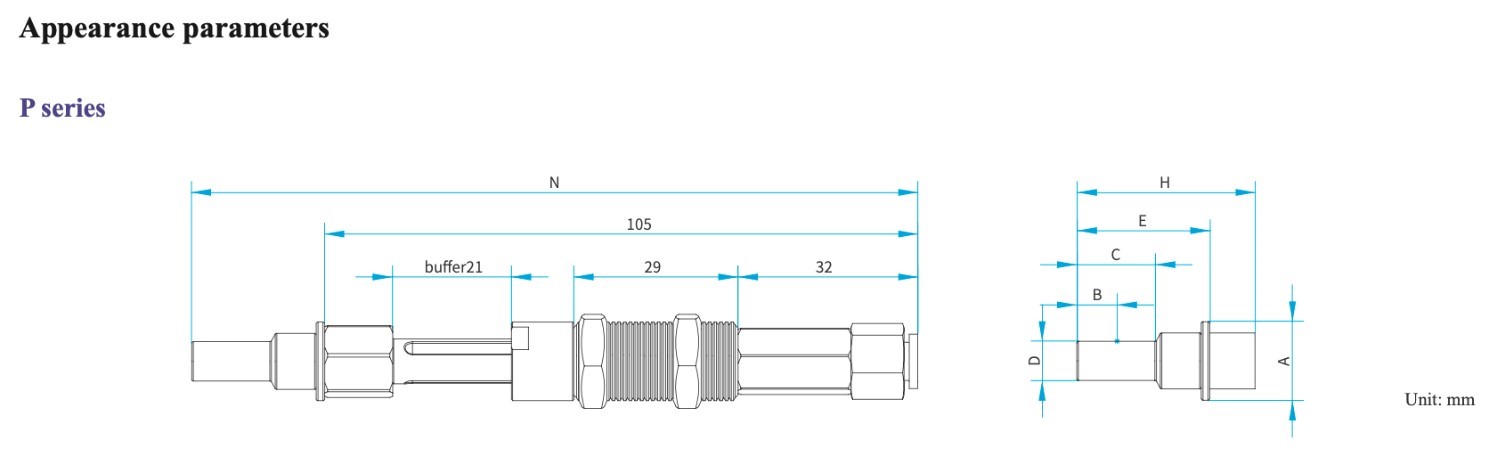
| Model | Skupna višina modula zračne blazine H | Premer kontaktne površine D | Premer konstrukcijskega dela A | Višina od delovnega premera do dna B | Višina efektivne kontaktne površine C | Delovna višina zračne blazine modul E | Skupna dolžina N |
| ISC-P4.5E | 25,5 | 4,5 | 14 | 4 | 8 | 17,5 | E+105 |
| ISC-P5E | 27,5 | 5 | 14 | 5 | 10 | 19,5 | E+105 |
| ISC-P6E | 30,5 | 6 | 14 | 6 | 12 | 22,5 | E+105 |
| ISC-P7E | 31,5 | 7 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P8E | 31,5 | 8 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P9E | 32,5 | 9 | 14 | 7,5 | 15 | 24,5 | E+105 |
| ISC-P10E | 32,5 | 10 | 14 | 7,5 | 15 | 24,5 | E+105 |
| ISC-P11E | 34,5 | 11 | 14 | 7,5 | 15 | 26,5 | E+105 |
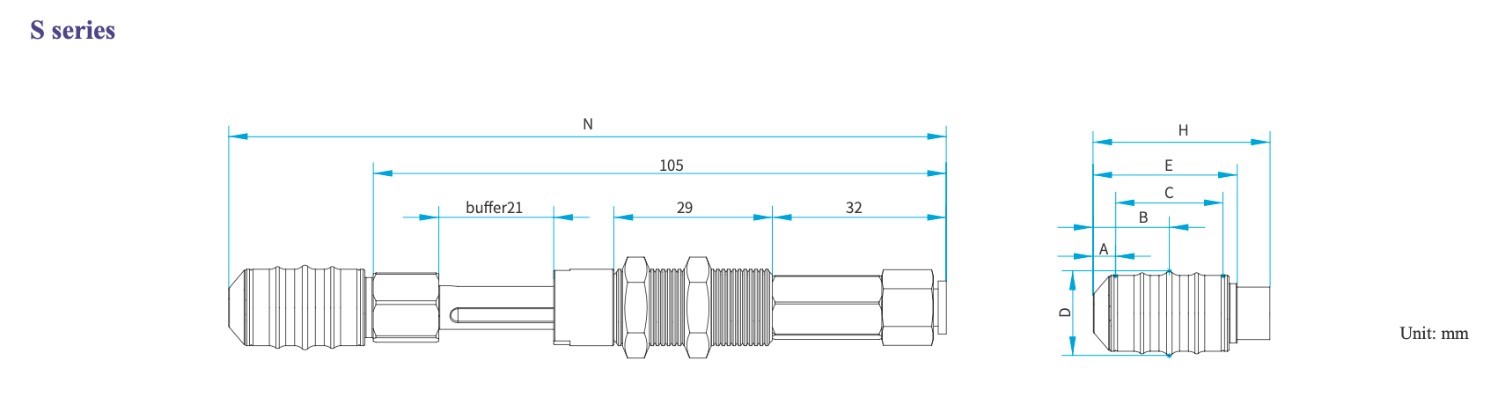
| Model | Skupna višina modula zračne blazine H | Premer kontaktne površine D | višina vodila A | Višina od delovnega premera do dna B | Višina efektivne kontaktne površine C | Delovna višina zračne blazine modul E | Skupna dolžina N |
| ISC-S14E | 32,5 | 14 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S15.5E | 32,5 | 15,5 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S18E | 40,5 | 18 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S20.5E | 40,5 | 20,5 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S23E | 40,5 | 23 | 6 | 19 | 26 | 34,5 | E+105 |
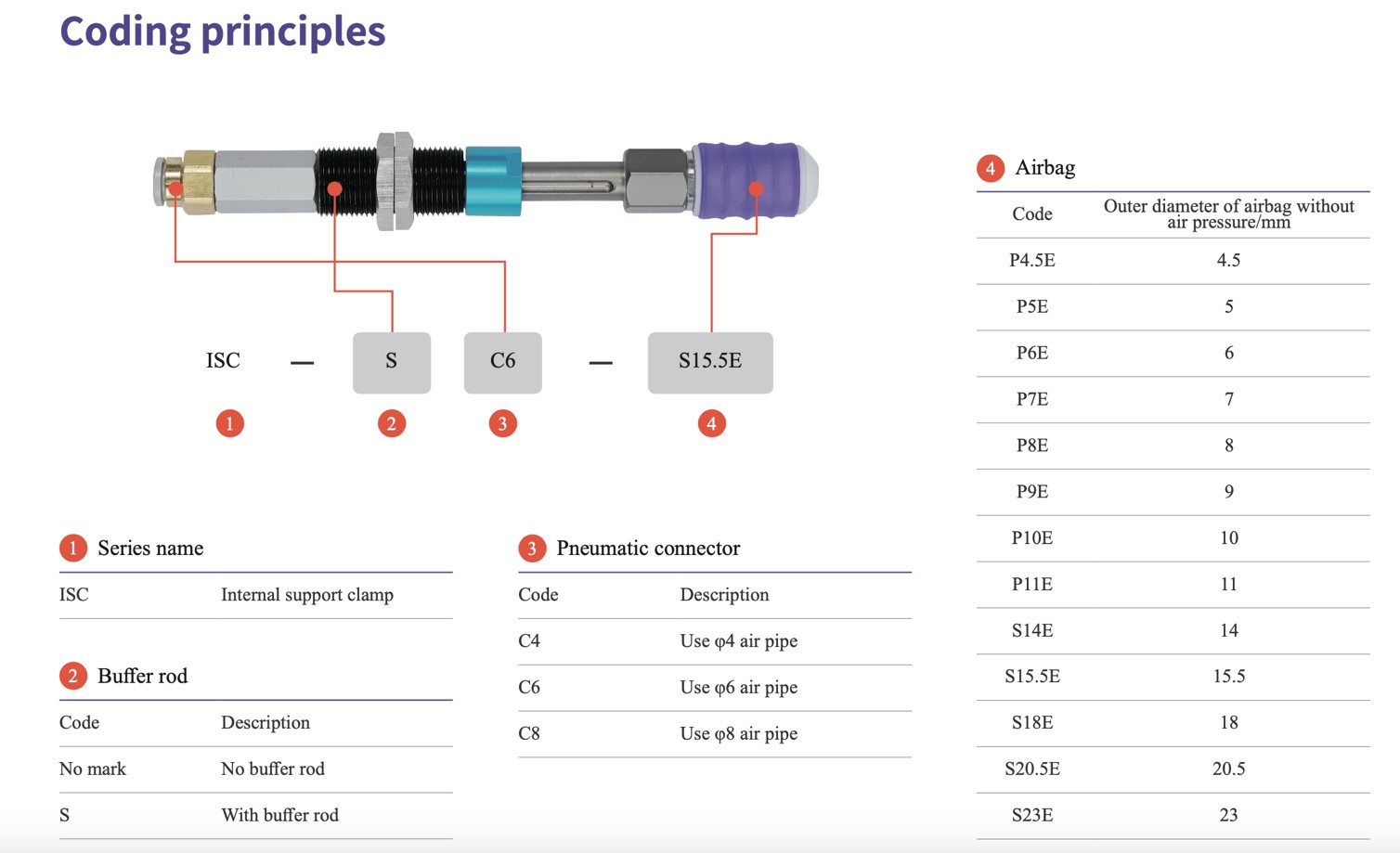
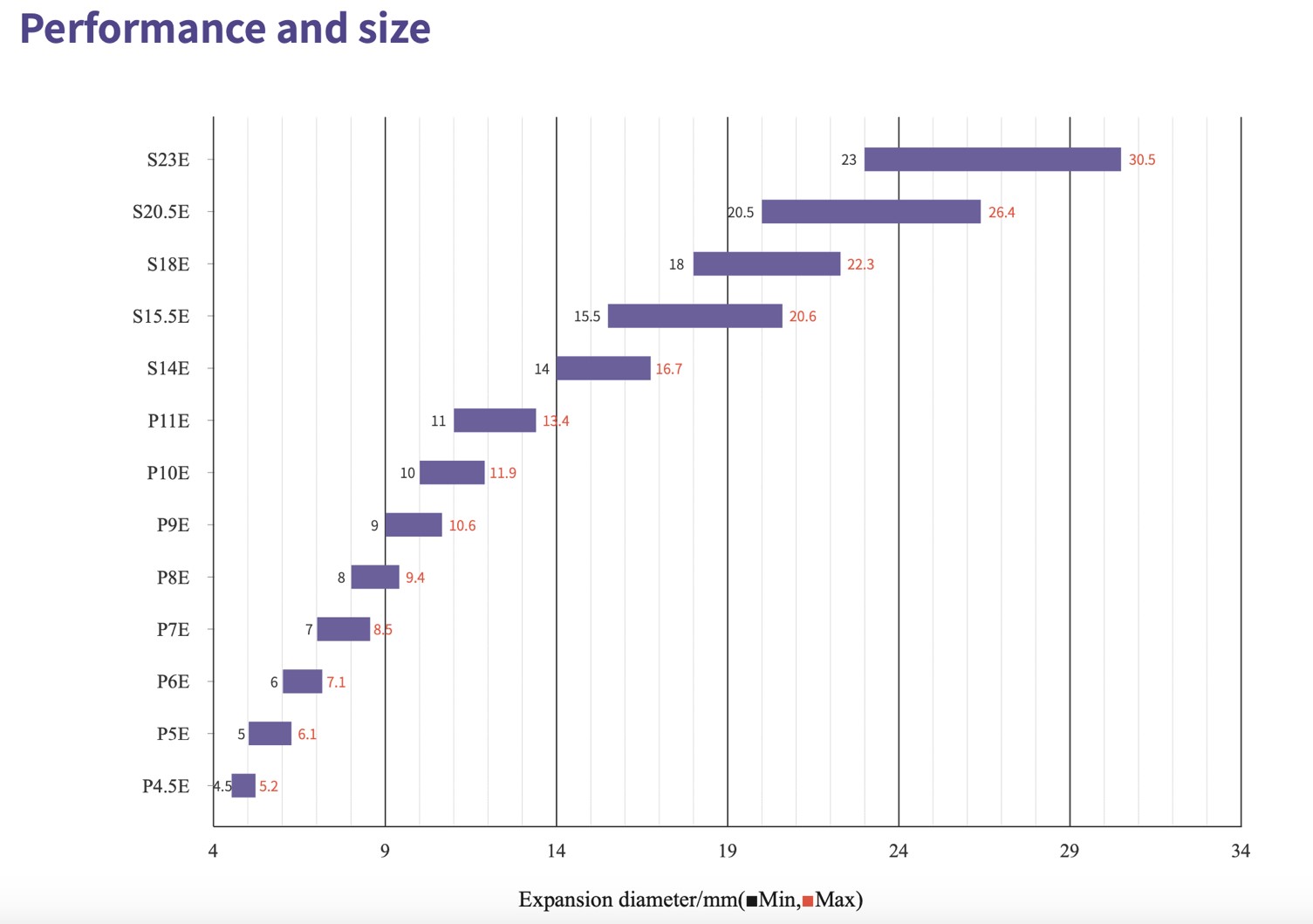
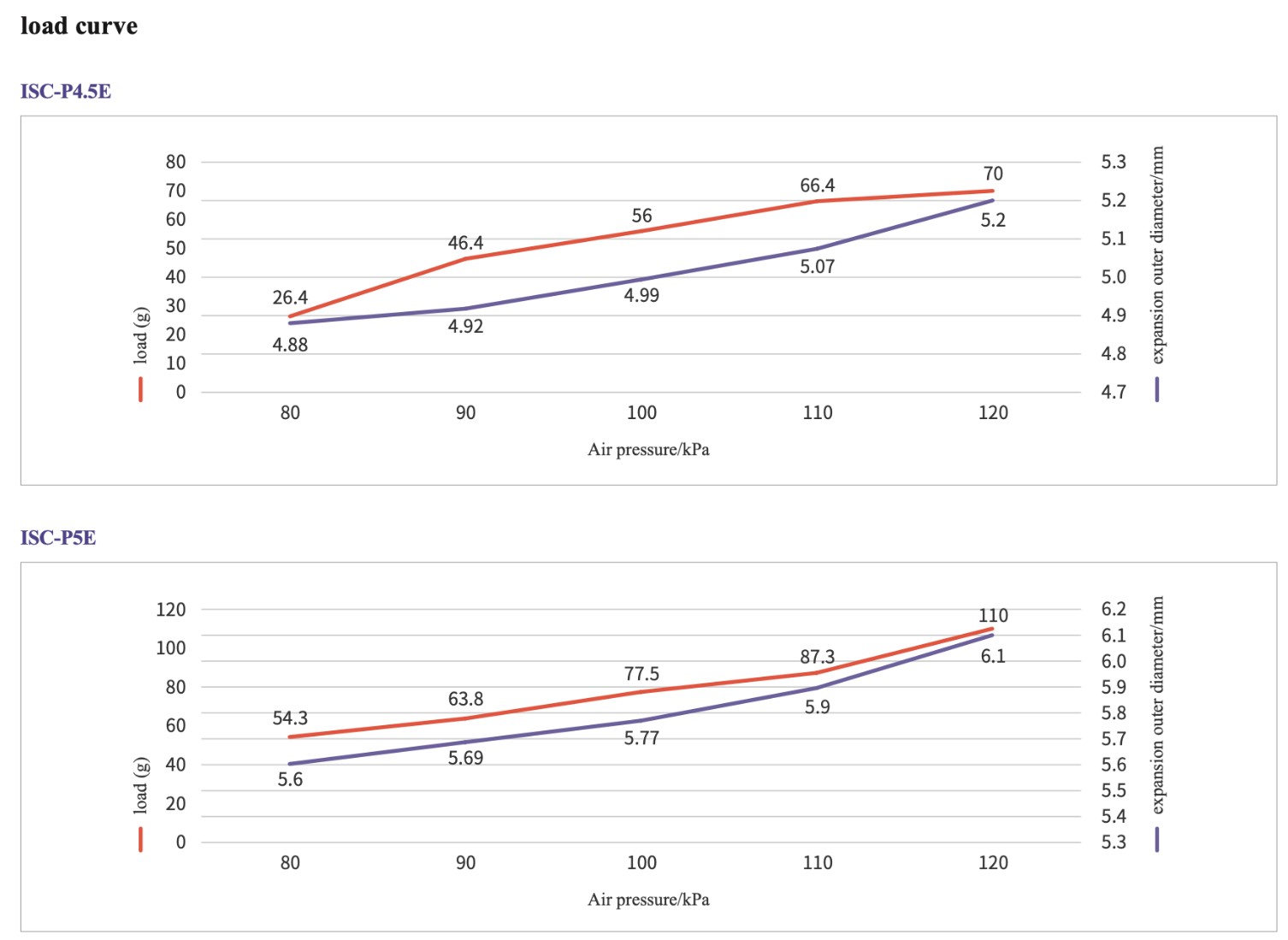
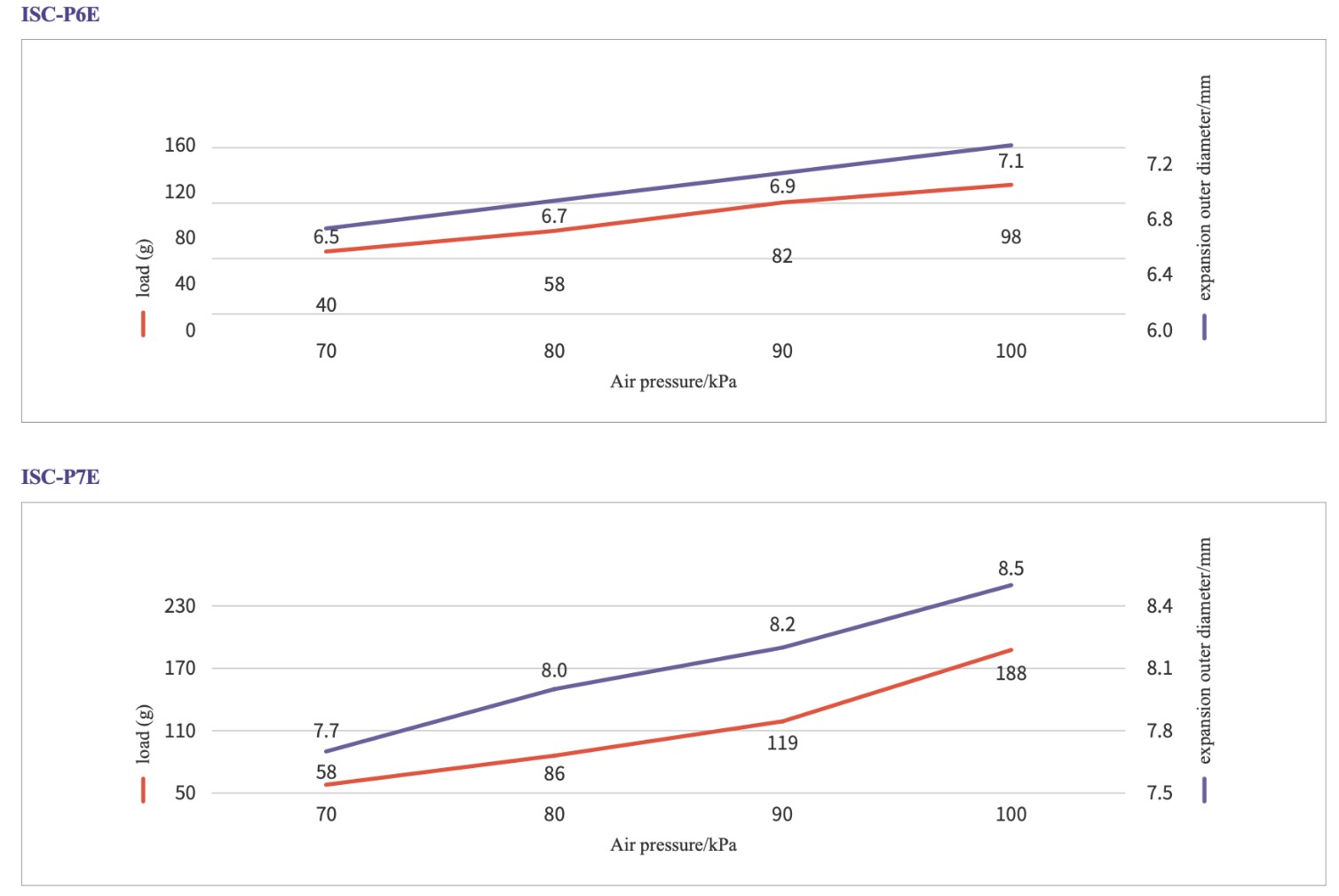
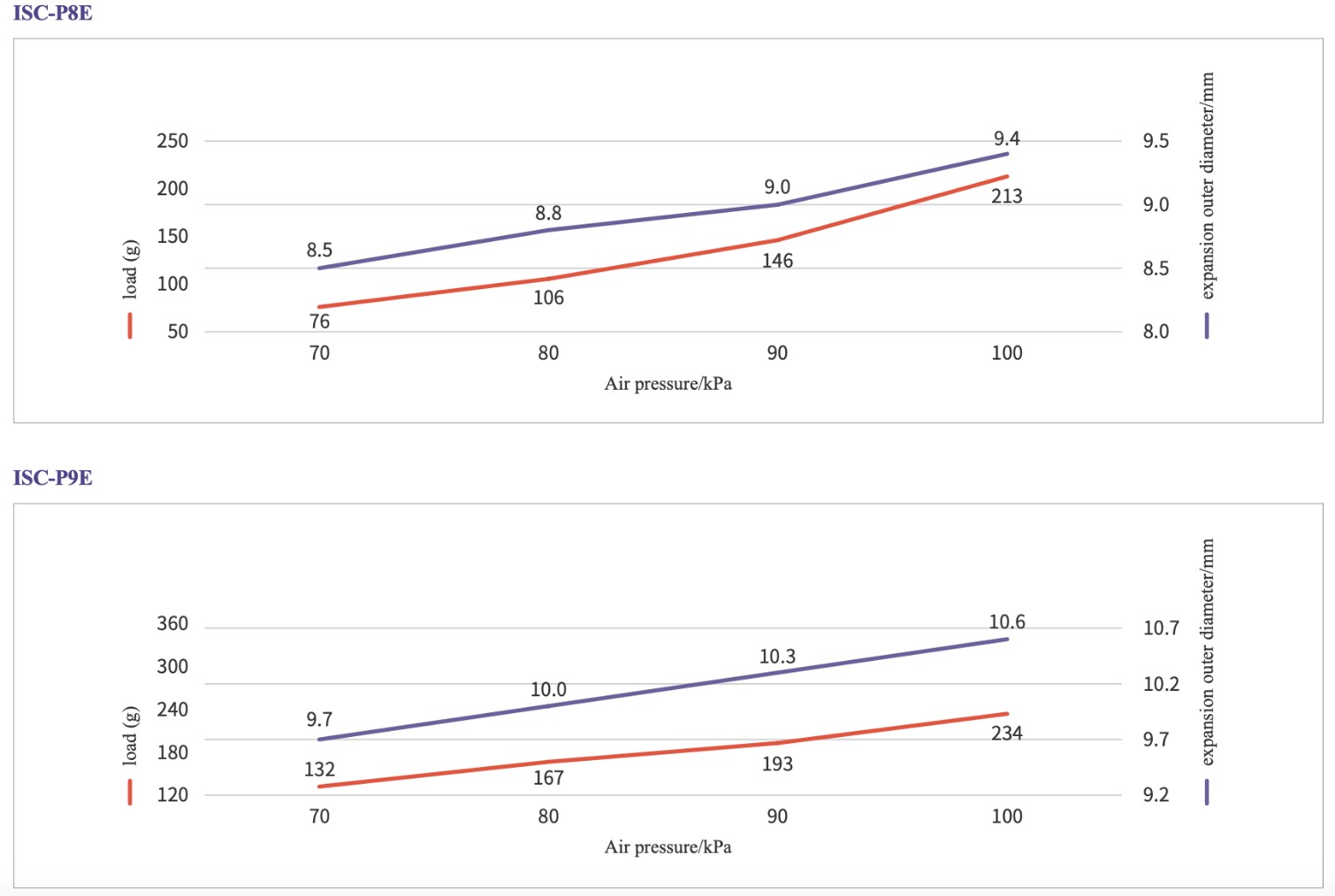
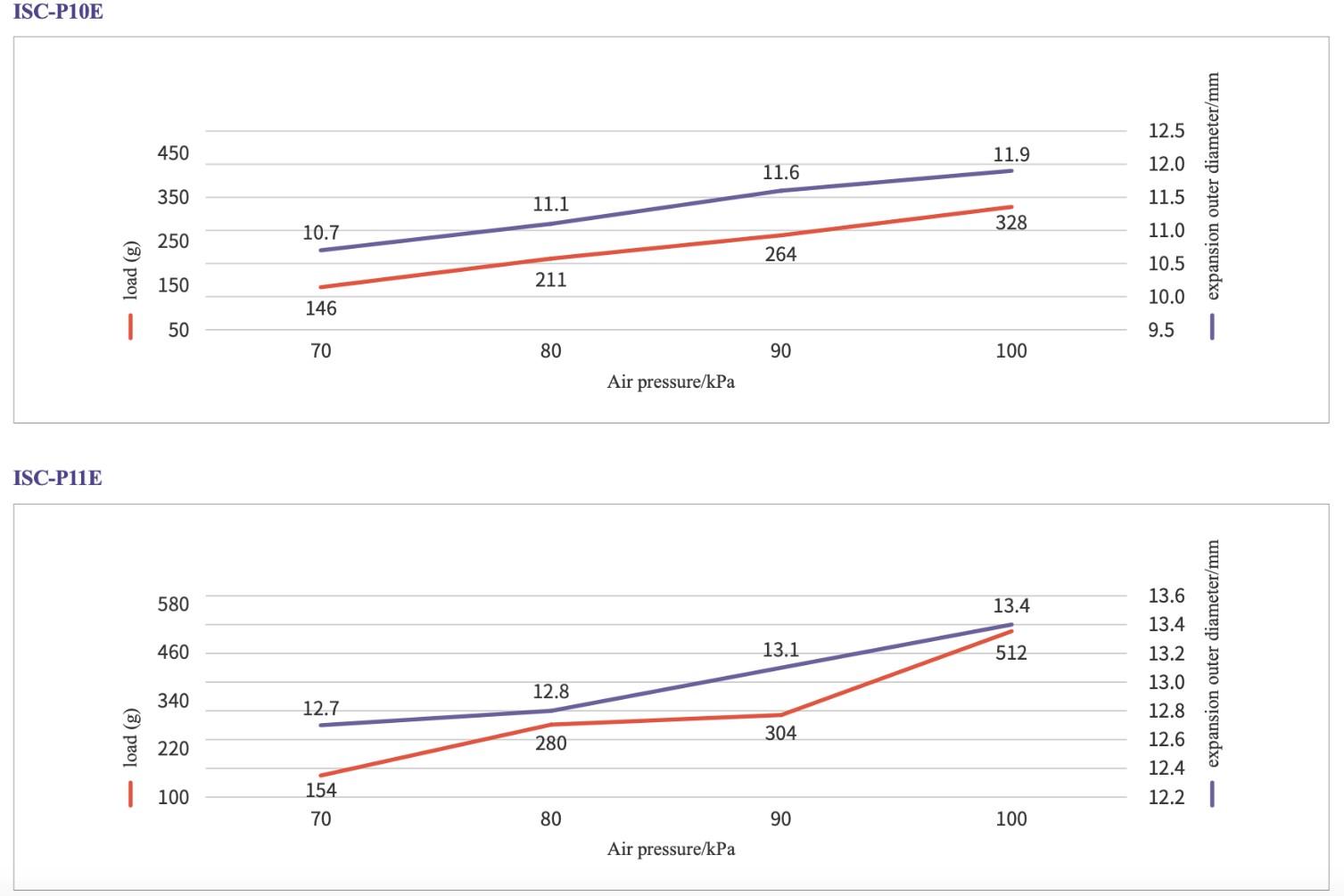
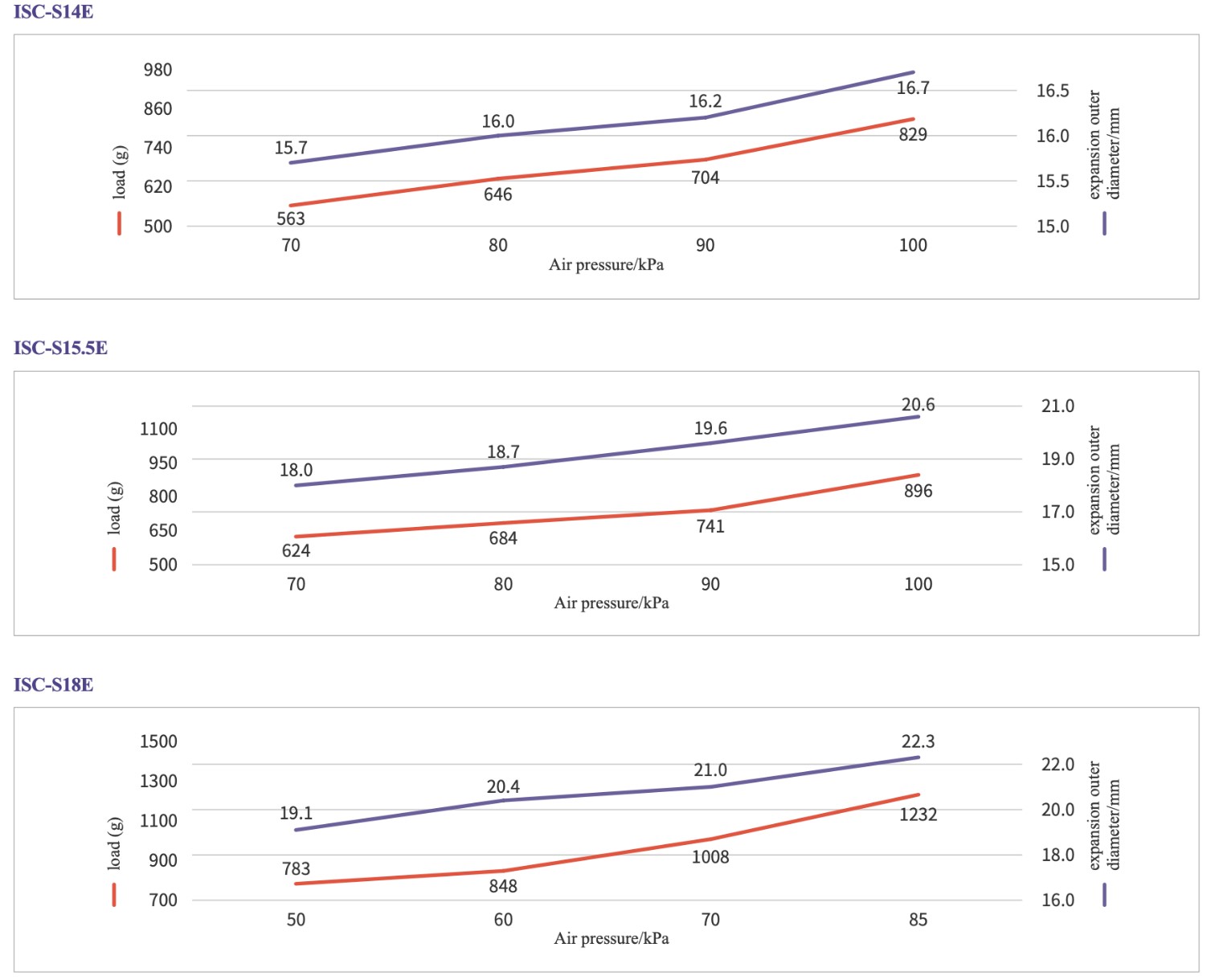
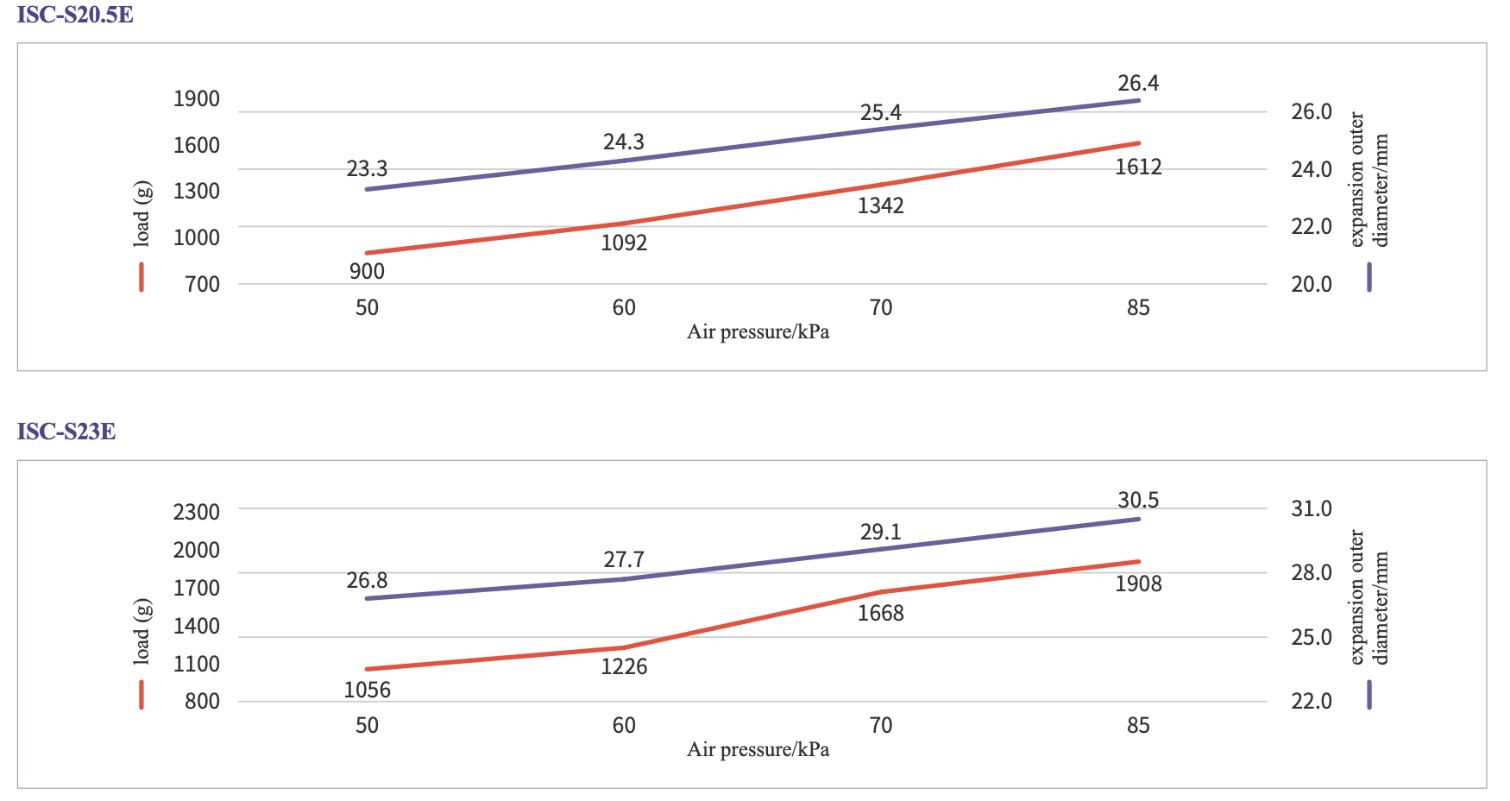
Razširjeni zunanji premer
| Model | Območje delovnega tlaka /kPa | Največji zunanji premer raztezanja/mm | Največja obremenitev/g | Teža vpenjala/g | Model kovinske palice | Dimenzija montažne luknje/mm |
| ISC-SC6-P4.5E | 0–120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P5E | 0–120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P6E | 0–100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P7E | 0–100 | 8,5 | 188 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P8E | 0–100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P9E | 0–100 | 10,6 | 234 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P10E | 0–100 | 11,9 | 328 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P11E | 0–100 | 13,4 | 512 | 38 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S14E | 0–100 | 16,7 | 829 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S15.5E | 0–100 | 20,6 | 896 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S18E | 0–85 | 22,3 | 1232 | 47 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S20.5E | 0–85 | 26,4 | 1612 | 49 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S23E | 0–85 | 30,5 | 1908 | 51 | VFNT 1421-G18 | 14,5 |
* Serija P ima največji preskusni predmet z obremenitvijo zunanji premer modela +0,3 mm; serija S ima največji preskusni predmet z obremenitvijo zunanji premer modela +1 mm; Preskus obremenitve se meri s profesionalnimi instrumenti.
Naše poslovanje


Kategorije izdelkov
-

DH ROBOTICS SERVO ELEKTRIČNI PRIJEMALNIK SERIJE RGD –...
-

SERIJA ELEKTRIČNIH PRIJEMALCEV HITBOT – Z-EFG-13...
-

SERIJA HITRIH MENJALNIKOV – QCA-200-D1 Hitri...
-

SERIJA HITRIH MENJALNIKOV – QC-200 Okrogli ročni ...
-

SERIJA HITRIH MENJALNIKOV – QCA-S100 Hitri C...
-

SERIJA HITRIH MENJALNIKOV – QCA-S500 Hitri C...