SCARA ROBOTSKA ROKA – Z-Arm-4160B Kolaborativna robotska roka





Glavna kategorija
Industrijska robotska roka / Kolaborativna robotska roka / Električni prijemalnik / Inteligentni aktuator / Rešitve za avtomatizacijo
Uporaba
Koboti SCIC Z-Arm so lahki 4-osni kolaborativni roboti z vgrajenim pogonskim motorjem, ki ne potrebujejo več reduktorjev kot drugi tradicionalni roboti SCARA, kar zmanjša stroške za 40 %. Koboti SCIC Z-Arm lahko izvajajo funkcije, vključno z, vendar ne omejeno na, 3D-tiskanje, ravnanje z materiali, varjenje in lasersko graviranje. Sposobni so močno izboljšati učinkovitost in prilagodljivost vašega dela in proizvodnje.
Značilnosti

Visoka natančnost
Ponovljivost
±0,02 mm
Prilagojena os Z
0,1–0,8 m
Velika koristna obremenitev
Stojalo 4 kg
Največ 5 kg
Višja hitrost
Največja linearna hitrost 2 m/s
(Nosilnost stojala 5 kg)
Velik razpon roke, visoka natančnost, 4-osna robotska roka in enostavna uporaba
Visoka natančnost
Ponovljivost: ±0,02 mm
Velik razpon rok
J1-os: 325 mm,Os J2: 275 mm
Prilagojena os Z
Hod gor-dol je mogoče prilagoditi med 0,1 m in 0,8 m
Prihranek prostora
Pogon/krmilnik je vgrajen
Preprosto in enostavno za uporabo
Tudi novinec, ki ni poznal robotske roke, je lahko enostaven za uporabo, vmesnik se odpira.
Visoka hitrost
Njegova hitrost je 2000 mm/s pri obremenitvi 4 kg

Sorodni izdelki



Specifikacijski parameter
SCIC Hitbot Z-Arm 4160B je zasnovalo podjetje SCIC Tech. Je lahek sodelujoči robot, enostaven za programiranje in uporabo, podpira SDK. Poleg tega podpira zaznavanje trkov, saj se samodejno ustavi ob stiku s človekom, kar zagotavlja pametno sodelovanje med človekom in strojem ter visoko stopnjo varnosti.
| Z-Arm 4160B Kolaborativna robotska roka | Parametri |
| Dolžina roke 1 osi | 325 mm |
| Kot vrtenja 1 osi | ±90° |
| Dolžina 2-osne roke | 275 mm |
| Kot vrtenja 2 osi | ±164° Izbirno: 15–345 stopinj |
| Hod osi Z | 410 Višina se lahko prilagodi |
| Območje vrtenja osi R | ±1080° |
| Linearna hitrost | 2000 mm/s (koristna obremenitev 4 kg) |
| Ponovljivost | ±0,02 mm |
| Standardni koristni tovor | 4 kg |
| Največja koristna teža | 5 kg |
| Stopnja svobode | 4 |
| Napajalnik | 220V/110V50-60HZ se prilagodi 48VDC, največja moč 960W |
| Komunikacija | Ethernet |
| Razširljivost | Vgrajen integriran krmilnik gibanja zagotavlja 24 V/I + razširitev pod roko |
| Z-osi je mogoče prilagoditi po višini | 0,1 m~0,8 m |
| Učenje vlečenja po osi Z | / |
| Električni vmesnik rezerviran | Standardna konfiguracija: 24*23awg (nezaščitenih) žic iz vtičnice skozi spodnji pokrov roke Izbirno: 2 vakuumski cevi φ4 skozi vtičnico in prirobnico |
| Združljivi električni prijemalnik HITBOT | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Dihalna svetloba | / |
| Obseg gibanja druge roke | Standardno: ±164° Dodatno: 15–345 stopinj |
| Dodatna oprema | / |
| Uporabi okolje | Temperatura okolice: 0–45 °C Vlažnost: 20–80 % relativne vlažnosti (brez zmrzali) |
| Digitalni vhod V/I (izoliran) | 9+3+podaljšek podlakti (neobvezno) |
| Digitalni izhod V/I vrat (izoliran) | 9+3+podaljšek podlakti (neobvezno) |
| Analogni vhod I/O (4–20 mA) | / |
| Analogni izhod V/I vhoda (4–20 mA) | / |
| Višina robotske roke | 860 mm |
| Teža robotske roke | Neto teža 36,5 kg, hod 410 mm |
| Osnovna velikost | 250 mm * 250 mm * 15 mm |
| Razdalja med pritrdilnimi luknjami za podnožje | 200 mm * 200 mm s štirimi vijaki M8 * 20 |
| Zaznavanje trkov | √ |
| Poučevanje vlečenja | √ |
Idealna izbira za lahka montažna opravila
Z-Arm XX60B je 4-osna robotska roka z velikim razponom roke, ki zaseda majhno površino, je zelo primerna za postavitev na delovno postajo ali v stroj in je idealna izbira za lahka montažna opravila.


Lahka z velikim kotom vrtenja

Teža izdelka je približno 36,5 kg, njegova največja obremenitev je lahko do 5 kg, kot vrtenja 1 osi je ±90°, kot vrtenja 2 osi je ±164°, območje vrtenja osi R pa je lahko do ±1080°.
Velik razpon rok, široka uporaba

Z-roka XX60B ima dolg razpon roke, dolžina 1-osne roke je 325 mm, dolžina 2-osne roke pa 275 mm, njena linearna hitrost pa lahko doseže do 2000 mm/s pri obremenitvi 4 kg.


Prilagodljivo za uvajanje, hitro preklapljanje
Z-Arm XX60B ima značilnosti lahke teže, varčevanja s prostorom in prilagodljive namestitve, primeren je za uporabo v številnih aplikacijah in ne bi spremenil prejšnje proizvodne postavitve, vključno s hitrim preklapljanjem procesnega zaporedja in dokončanjem proizvodnje majhnih serij itd.
DragTeaching za dokončanje programa

Programska oprema temelji na grafičnem oblikovanju in ima module za točko, izhodni signal, električni prijemalnik, pladenj, zakasnitev, podproces, ponastavitev in druge osnovne funkcionalne module. Uporabniki lahko modul povlečejo za nadzor robotske roke v programskem območju. Vmesnik je preprost, a funkcije zmogljive.
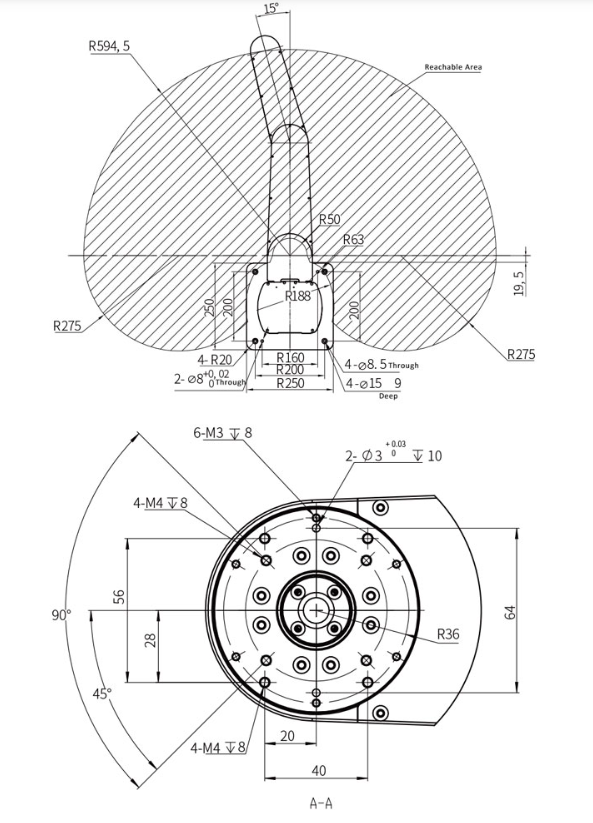
Območje gibanja Različica M1 (vrtenje navzven)
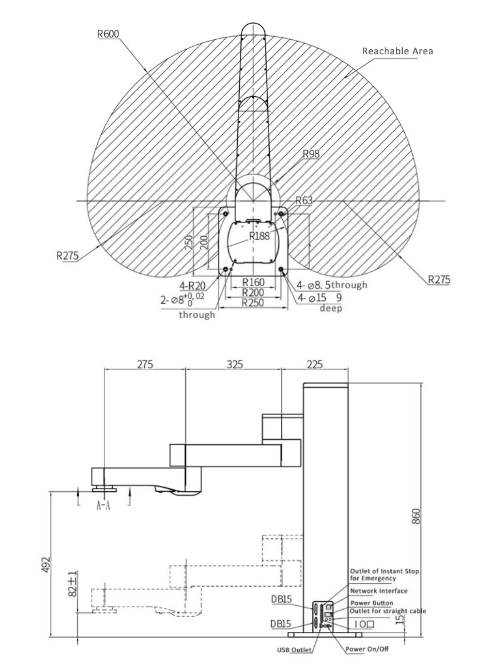
Priporočilo za priključek DB15

Priporočen model: Pozlačen moški konektor z ABS ohišjem YL-SCD-15M Pozlačen ženski konektor z ABS ohišjem YL-SCD-15F
Opis velikosti: 55 mm * 43 mm * 16 mm
(Glej sliko 5)
Diagram zunanjega okolja uporabe robotske roke

Naše poslovanje






