SERIJA ELEKTRIČNIH PRIJEMALCEV HITBOT – Z-EFG-R kolaborativni električni prijemalec



Glavna kategorija
Industrijska robotska roka / Kolaborativna robotska roka / Električni prijemalnik / Inteligentni aktuator / Rešitve za avtomatizacijo
Uporaba
Robotski prijemalniki serije SCIC Z-EFG so majhni in imajo vgrajen servo sistem, ki omogoča natančen nadzor nad hitrostjo, položajem in vpenjalno silo. Vrhunski sistem prijemanja SCIC za avtomatizacijske rešitve vam bo odprl nove možnosti za avtomatizacijo nalog, za katere niste nikoli mislili, da so mogoče.

Funkcija

·Majhen, a zmogljiv električni prijemalnik s servo motorjem.
·Terminale je mogoče zamenjati, da se izpolnijo različne zahteve projekta.
·Lahko pobere krhke in deformabilne predmete, kot so jajca, epruvete, obročki itd.
·Primerno za prizore brez virov zraka (kot so laboratoriji in bolnišnice).
Integrirani servo sistem, uporabljen za različne zahteve
Velika vpenjalna sila
Vpenjalna sila: 80N,
hod: 20 mm
Nadzor natančnosti
Ponovljivost: ±0,02 mm
Priklopi in igraj
Posebej zasnovano zašestosni električni prijemalnik
Krmilnik je vgrajen
Pokriva majhno površino, priročno za integracijo.
Rep se lahko spremeni
Njegov rep se lahko spremeni, da se uporabi za različne zahteve.
Mehko vpenjanje
Lahko vpne krhke predmete

● Spodbujanje revolucije pri zamenjavi pnevmatskih prijemal z električnimi prijemali, prvo električno prijemalo z integriranim servo sistemom na Kitajskem.
● Popolna zamenjava za zračni kompresor + filter + solenoidni ventil + dušilni ventil + pnevmatsko prijemalo
● Večciklična življenjska doba, skladna s tradicionalnim japonskim cilindrom




Specifikacijski parameter
Z-EFG-R je robotsko električno prijemalo z vgrajenim krmilnikom in več funkcijami v enem. Majhne velikosti, a zmogljivega delovanja.
● Majhen, a zmogljiv električni prijemalnik s servo motorjem.
●Terminale je mogoče zamenjati, da se izpolnijo različne zahteve projekta.
● Lahko pobere krhke in deformabilne predmete, kot so jajca, epruvete, obročki itd.
● Primerno za prizorišča brez virov zraka (kot so laboratoriji in bolnišnice).
Z-EFG-R je majhen električni prijemalnik z integriranim servo sistemom, ki lahko nadomesti črpalko + filter + elektronsko magnetno napravo + dušilni ventil + zračni prijemalnik.
| Model št. Z-EFG-R | Parametri |
| Skupni možganski udar | 20 mm |
| Sila prijema | 80N |
| Ponovljivost | ±0,02 mm |
| Priporočena teža prijema | 0,8 kg |
| Način prenosa | Zobniška letev + Prečno vodilo |
| Polnjenje masti gibljivih komponent | Vsakih šest mesecev ali 1 milijon premikov/čas |
| Čas enosmernega gibanja | 0,45 s |
| Delovno temperaturno območje | 5–55 ℃ |
| Delovno območje vlažnosti | RH35-80 (brez zmrzali) |
| Način gibanja | Dva prsta se premikata vodoravno |
| Nadzor gibov | Nastavljiv |
| Nastavitev vpenjalne sile | Nastavljiv |
| Teža | 0,5 kg |
| Dimenzije (D*Š*V) | 68*68*132,7 mm |
| Namestitev krmilnika | Vgrajeno |
| Moč | 5W |
| Tip motorja | Brezkrtačni enosmerni tok |
| Nazivna napetost | 24V |
| Vršni tok | 1A |
| Prilagodljiva šestosna robotska roka | UR, Aubo |
Vgrajena sta vožnja in krmilnik
Z-EFG-R je majhen električni prijemalnik z integriranim servo sistemom, ki lahko nadomesti zračno črpalko + filter + elektronsko magnetno loputo + dušilno loputo + zračni prijemalnik.


Združljivo s šestosno robotsko roko
Prijemalo je združljivo z običajnim šestosnim robotskim rokom, za doseganje funkcije »plug and play« ima hod dolg 20 mm, vpenjalna sila je 80 N, hod in vpenjalna sila pa sta nastavljiva.
Majhna figura, prilagodljiva za namestitev
Velikost Z-EFG-R je D68 * Š68 * V132,7 mm, njegova struktura je kompaktna, podpira več načinov namestitve, ima vgrajen krmilnik, zavzame malo prostora in je enostaven za uporabo pri različnih zahtevah vpenjalnih nalog.

Hitro reagiranje, nadzor natančnosti
Najkrajši čas gibanja posameznega hoda je 0,45 s, njegova ponovljivost je ±0,02 mm, njegov zadnji del je mogoče enostavno spremeniti, stranke pa lahko predmet vpnejo po želji.
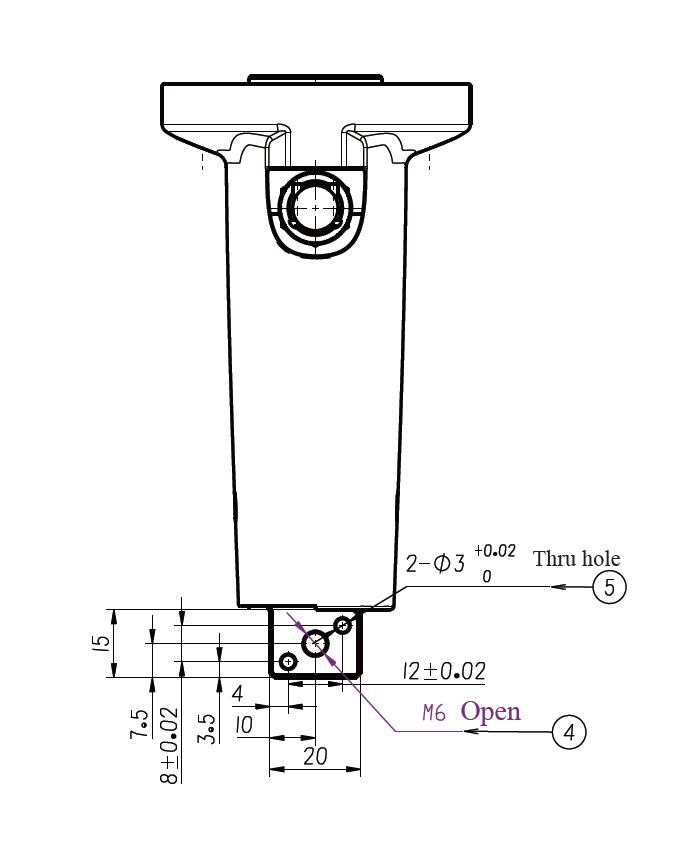
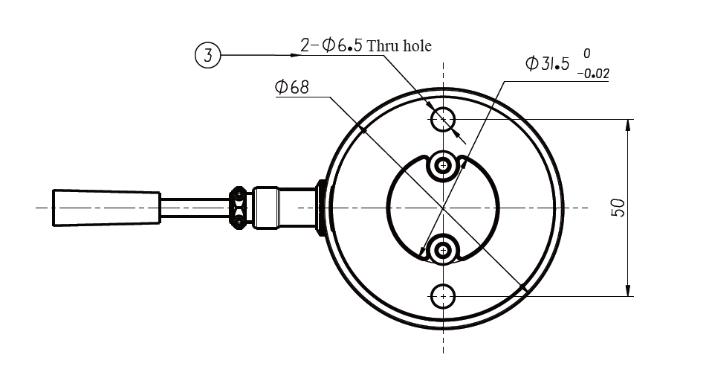
Diagram namestitve dimenzij
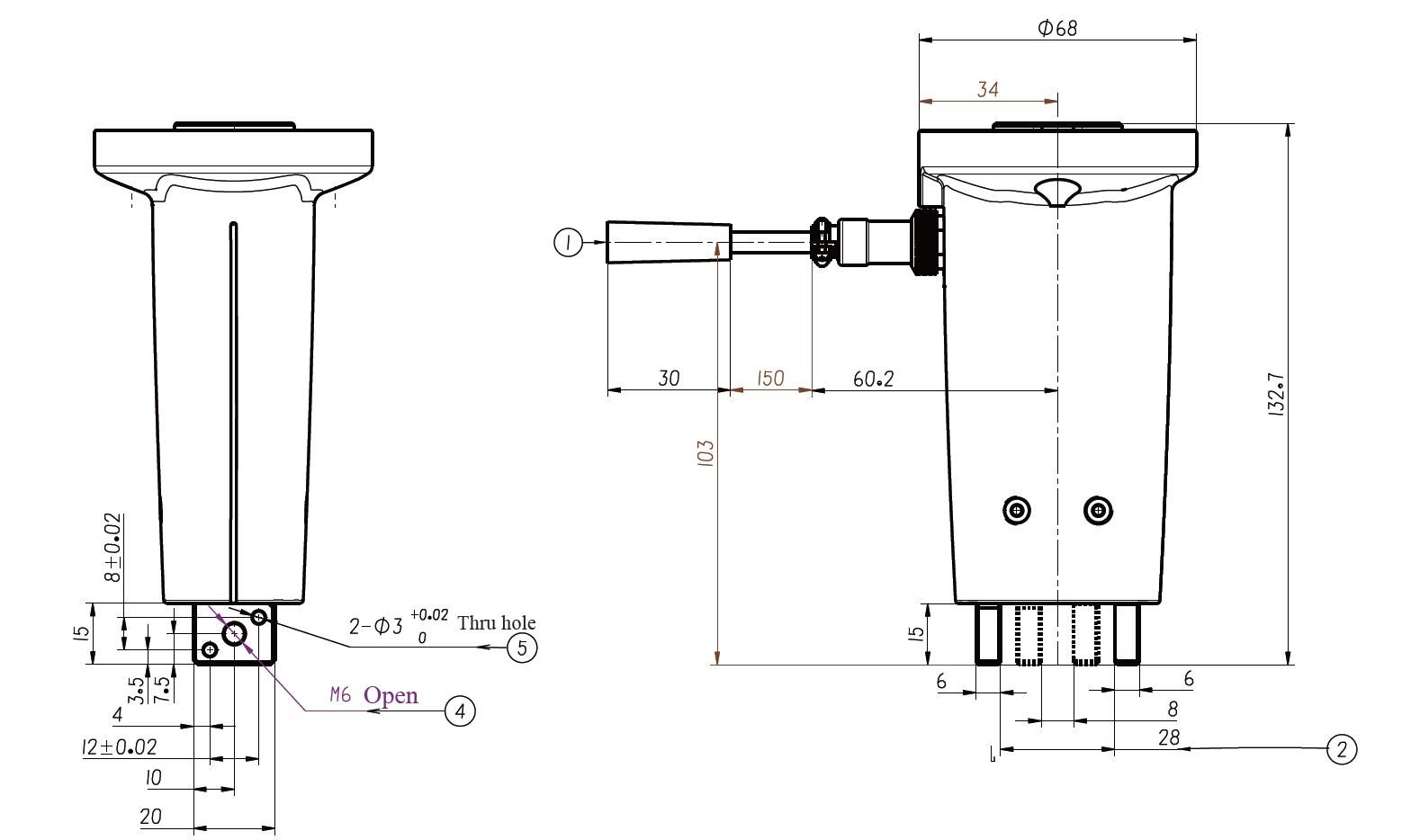
① RKMV8-354 Petžilni letalski vtič za RKMV8-354
② Hod električnega prijemala je 20 mm
③ Položaj namestitve, uporabite dva vijaka M6 za povezavo s prirobnico na koncu robotske roke UR
④ Položaj namestitve, položaj namestitve vpenjalne naprave (vijak M6)
⑤ Položaj namestitve, položaj namestitve vpenjala (3 valjaste luknje za zatič)
Električni parametri
Nazivna napetost 24±2V
Tok 0,4 A

Naše poslovanje


Kategorije izdelkov
-

DH ROBOTICS SERVO ELEKTRIČNI PRIJEMALO SERIJE PGE –...
-

DH ROBOTICS SERVO ELEKTRIČNI PRIJEMALO RGI SERIJE –...
-

DH ROBOTICS SERVO ELEKTRIČNI PRIJEMALO SERIJE PGE –...
-

SERIJA ELEKTRIČNIH GRIPER HITBOT – Z-EFG-50 Paral...
-

DH ROBOTICS SERVO ELEKTRIČNI PRIJEMALO RGI SERIJE –...
-

SERIJA ELEKTRIČNIH PRIJEMALCEV HITBOT – Z-EFG-40...